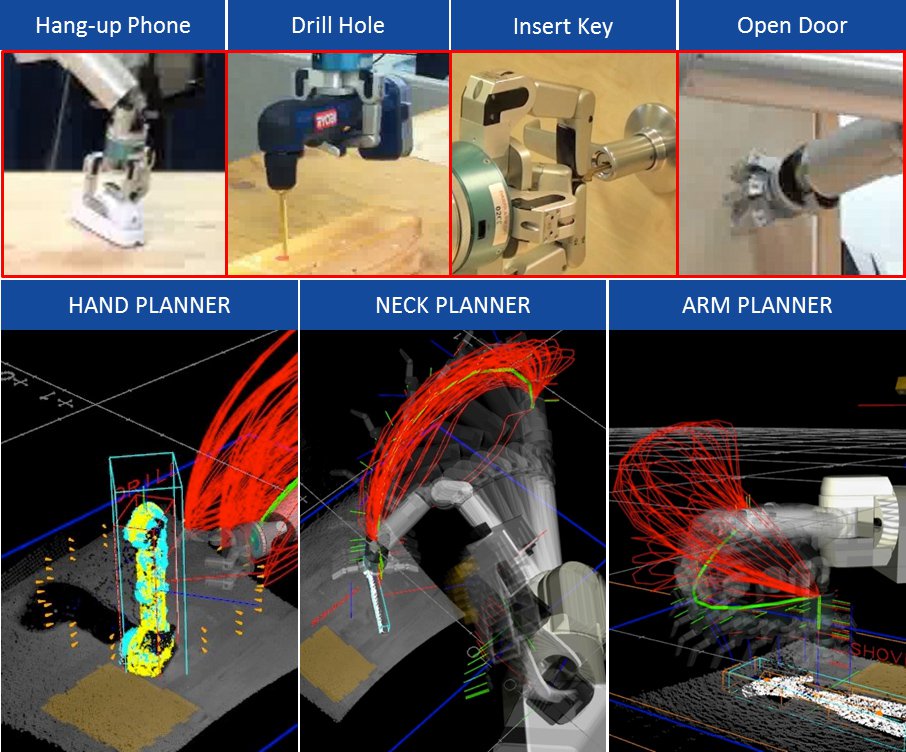
Across the top are shown several representative pictures taken during execution of autonomous manipulation activities as indicated. The bottom row shows graphical representations of object recognition and localization, as well as possible trajectories evaluated for the hand, neck, and arm in the system.