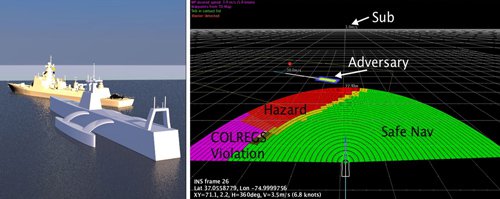
Display outputs of the JPL maritime simulation environment (JPL-MSE). Left: On-water view of the models during a blocking situation; Right: Snapshot of autonomy system view including the navigational software (velocity obstacle) and the intent derived from the sensors (red text in upper left corner). The view on the right is also used for the on-water runs.