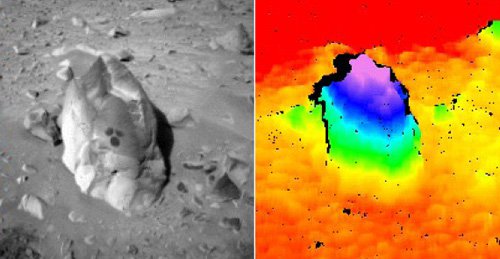
An example of JPL stereo vision image processing, as used by the MER Mars rovers. On the left is one image from a stereo pair, while the right shows an elevation map computed from the pair. Elevation maps of the terrain are used for navigation and manipulation decisions.