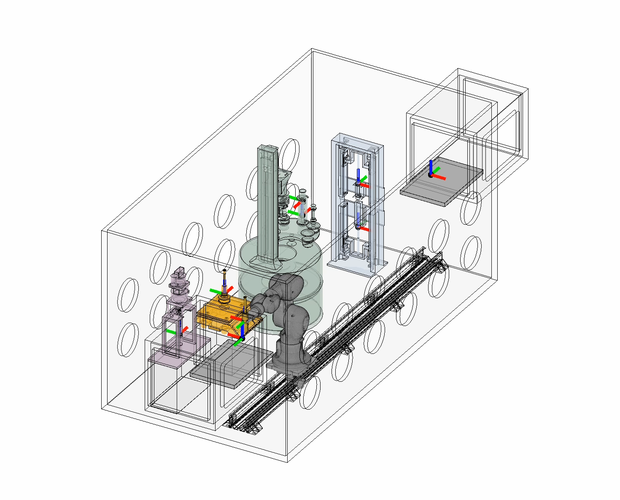
This simulation tool was developed to visualize the robotic arm and processing stations in the Processing Isolator Chamber (PIC) glovebox, as well as determine a feasible trajectory for the robot to complete the operational steps.
POC: Paulo Younse