

SmartNav Rover
The commercial ActivMedia Pioneer 2AT robot is a four-wheel-drive, skid-steering platform which provides wheel odometry and eight sonar sensors. It is used to test JPL-developed algorithmic capability to perform off-road driving in natural terrain, such as that found on Mars. The basic Pioneer is supplemented with a vision "turret" containing four USB cameras, an electronic compass, and a notebook computer running the Linux operating system. The notebook computer sends commands to the Pioneer's low-level microcontroller via a serial link. The four USB cameras mounted on the Pioneer combine to provide a 180° field of view, which is split into the three front, right, and left sectors used for regional terrain assessment. Areas of overlap between camera images are used to provide a "beam" for slope estimation for each sector through stereo matching. Both the vision system and the Pioneer's built-in sonar sensors are used for local obstacle detection. The software system running on the robot's notebook computer is written using fuzzy-logic navigation software developed at JPL.

Clifford Rover
The Clifford is a slightly modified iRobot ATRV Jr. rover, currently used to extend CLARAty onboard robotics software to a low-cost platform. JPL has retrofitted the rover with front and back FireWire stereo camera pairs with adjustable tilt and baselines.
The ATRV Jr. rover is skid steered, with individual motors and control for each side of the rover. While ground clearance for this rover is low, its powerful motors enable it to operate in moderately rough and rocky terrain. The avionics consist of a motherboard with additional PCI boards for communication and control, and two custom motor-controller boards operating the two motors and communicating through an Ethernet to the main processor. The rover also contains a built-in Crossbow Inertial Measurement Unit for pose estimation.
A duplicate rover is on loan to Carnegie Mellon University, serving as a common platform with JPL for shared development and testing of algorithms and software.

Fig. 1: LAGR Rover.
As part of our funding from DARPA's Learning Applied to Ground Robotics Program (LAGR), JPL has been lent two mobile robots built specifically for the program. The robots are four-wheeled, but are built around a rugged wheel-chair chassis. The standard sensor suite includes two stereo camera pairs, IR proximity sensors and a GPS receiver, and is supported by four Pentium-M embedded processors and 320 Gb of onboard storage. Battery life is sufficient for four hours of continuous operation, or traverses of up to 7 km.
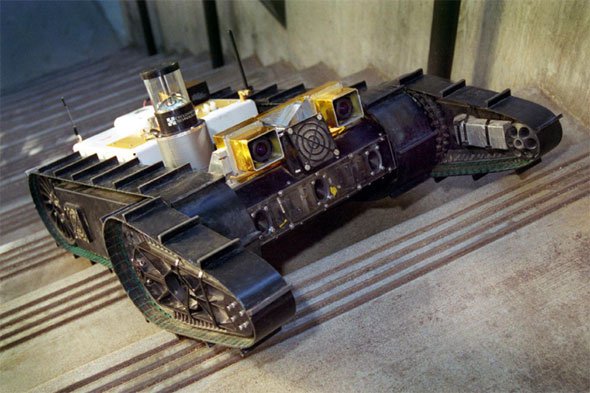
Fig. 1: The "Urbie" urban robot during vision-guided, autonomous stair climbing.
Urbie is a robotic platform designed for urban environments. The chassis is an iRobot� Packbot augmented with a perception payload consisting of two Pentium PC-104 form-factor processors, wireless Ethernet, a differential GPS receiver, an inertial measurement unit, digital compass and inclinometer, a single-axis scanning laser range finder (LIDAR), an omni-directional camera and a binocular stereo camera pair. One processor is dedicated to vision processing, while the other is dedicated to navigation. When combined with JPL's sophisticated perception and navigation software, these sensors enable Urbie to perform a wide range of autonomous tasks, including EKF-based self-localization, autonomous stair climbing, LIDAR and stereo-vision-based obstacle avoidance, safeguarded teleoperation, GPS and visually-designated waypoint navigation, visual servoing, and autonomous retrotraverse.

JPL Humvee
The JPL High-Mobility Multi-Wheeled Vehicle (HMMWV) is an unmanned ground vehicle (UGV) capable of autonomous navigation on off-road terrain. It is used as a test-bed vehicle to evaluate the performance of day/night passive-perception sensors (visible, infrared, multispectral) and to develop and test algorithms such as iris control, real-time stereo ranging, obstacle detection, path planning, path following, velocity control, gaze control, and terrain classification.
The computing system includes several VME single-board computers operating under the VxWorks real-time operating system. The HMMWV is equipped with a NovAtel RT20 differential global positioning system (DGPS) receiver, which yields a 20-cm horizontal circular-error-probable (CEP) accurate positioning solution at 10 Hz. It also contains a Honeywell Modular Azimuth Positioning System (MAPS), an inertial navigation system (INS) that produces position, orientation, and velocity data at 25 Hz. The INS and DGPS solutions are integrated with an external Kalman filter. A 5-kW propane generator, housed in a side panel, provides power for all onboard sensors and computing hardware.






