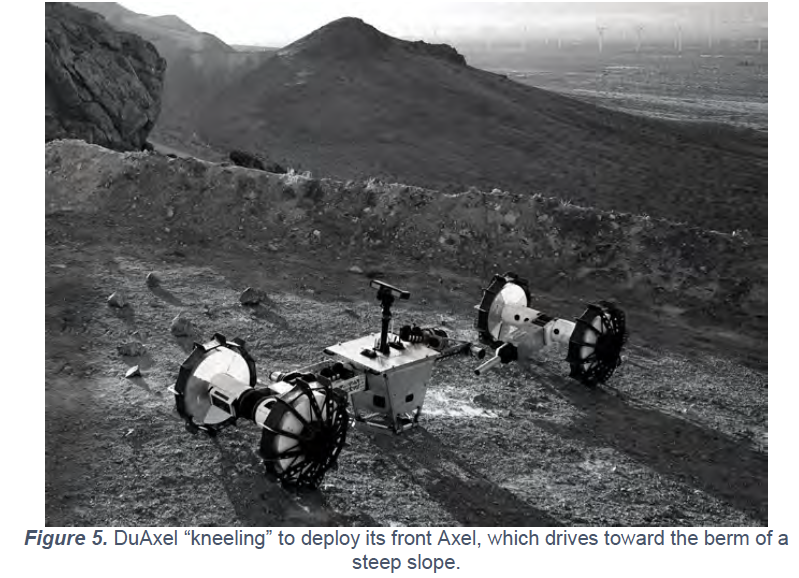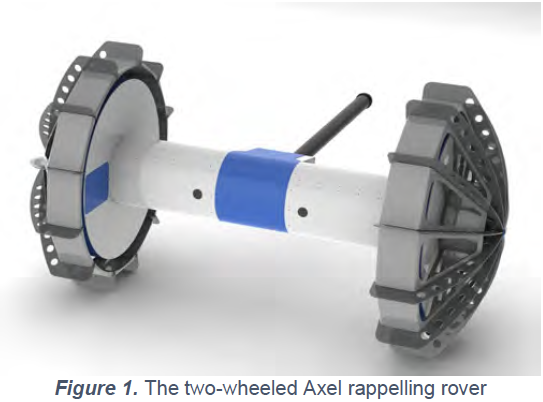
The Axel family of rovers extends planetary mobility to steep and rugged terrains such as the interior of crater walls, pits, gullies, canyons, and crevasses. A key constituent of this family is the Axel rover, a two-wheeled tethered vehicle designed to rappel down highly sloped terrain. Axel uses its large wheels to maneuver around obstacles and traverse rocky terrains as shown in Fig. 1. Its tether provides mechanical support on steeper slopes and delivers power and communication from a host platform. Axel can point its body and deploy instruments on rough surfaces.
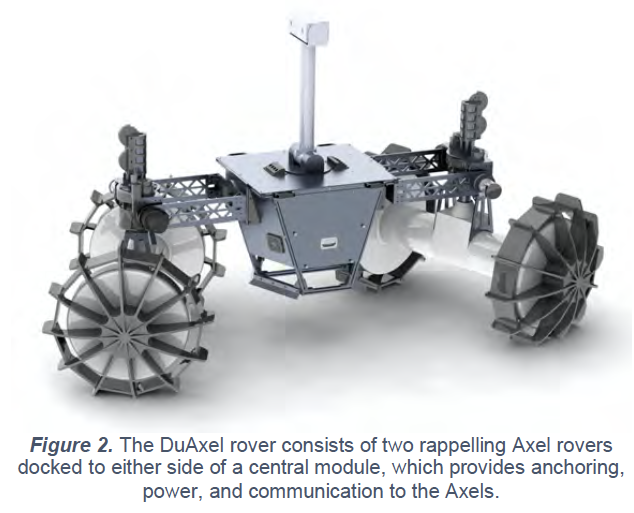
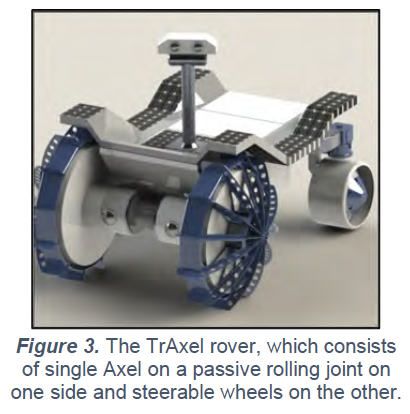
Axels can be hosted on a fixed lander or a larger rover, or can themselves form a larger vehicle. An example of the latter is the DuAxel rover shown in Fig 2. This four-wheeled, Ackermann-steered vehicle is formed by docking two Axels to either side of a central module. The docking mechanisms allow the attached Axels to yaw and roll to enable mobility over undulated and rocky terrain. These mechanisms also enable DuAxel to lower itself to the ground on either side (a.k.a. a “kneel” maneuver) in order to deploy one or both Axels for exploring steeper terrains. Kneeling also serves as an anchor for deploying a single Axel but additional active anchoring is used depending on the terrain (Fig. 5). An alternate configuration to the DuAxel is a comparable four-wheeled Ackermann-steered vehicle with a single-sided Axel that uses a simplified docking mechanism on one side and steerable wheels on the other as shown in Fig 3. These versatile platforms enable both scientific and human-oriented exploration of otherwise inaccessible planetary surfaces in the solar system.
Designed to minimize complexity and increase robustness, the Axel rover uses a symmetrical design, which allows it to continue to operate in the event it flips over. It houses four primary actuators to control its two wheels, its boom, and an internal spool that carries hundreds of meters of tether. Secondary actuators are used to level wind the tether for repeated excursions as well as deploying instruments to the surface. Multiple instruments are housed inside its instrument bays within the wheel wells, which rotate independent of the wheels. Axel’s two-wheel design allows differential driving and flexible maneuvering without complex steering mechanisms. By coordinating the primary actuators, the rover can adjust its body pitch on slopes and orient different instruments along the rugged surface normal. The boom provides a reaction force for mobility on flatter terrains and provides a conduit for the tether to avoid entanglement. It also allows the rover to pitch/orient its body and instruments.
Because its four primary actuators are aligned, Axel enjoys multiple redundancies, which make it resilient to single actuator failure. For example, in addition to using the wheels for mobility, the boom can also be used to drive the rover forward or backward, following a drive-wheel failure. Coordinating the boom’s motion with the non-failed wheel allows for turning in both directions. The spool and boom actuation have overlapping functionality for spooling the tether. The overall design can support different wheel types and sizes.
Axel co-locates its stereo cameras, sensors, actuators, electronics, power components, and payloads inside a single enclosure, which provides robustness against environmental extremes and simplifies thermal management. Its sensor suite and onboard software enable autonomous tethered navigation on slopes.

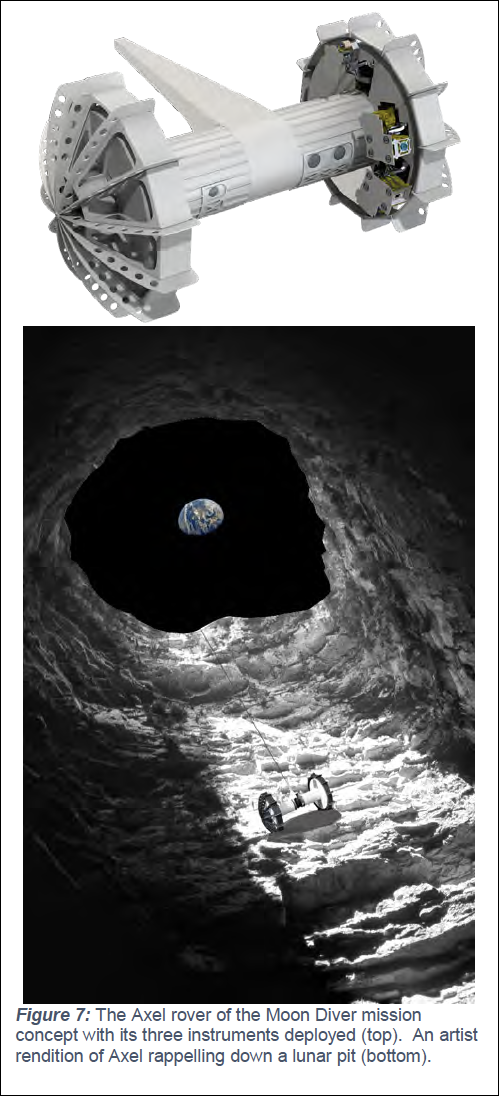
Hosted on a lunar lander with precision landing capabilities, the Axel rover was proposed by the Jet Propulsion Laboratory as part of the Moon Diver mission concept to the 2019 Discovery competition (Fig. 7).
JPL's conceptual development of the Axel rovers began in 1999 as a modular, reconfigurable robotics system that uses mobility elements (the Axel rovers) to dock to and relocate payloads (the central modules) on a planetary surface (Fig. 8). Later these rovers were adapted to explore extreme terrains. At the time of its inception, other two-wheeled designs were independently conceived at University of Minnesota (first published in April 2000), which were later commercialized and used in military applications.
JPL led the team which developed the Axel rover in collaboration with Prof. Joel Burdick of Caltech. Earlier developments of Axel included collaborations with Prof. Raymond Cipra at Purdue University and Prof. Murray Clark at Arkansas Tech University.
POC: Issa A.D. Nesnas