
The JPL Robotics research team participating in the DARPA Autonomous Robot Manipulation Software (ARM-S) Program, placed first in phase one amongst six teams from around the nation. The JPL team was led by Principal Investigator Paul Backes, Prof. Joel Burdick from Caltech, and Task Manager Nick Hudson.
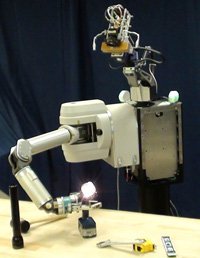
In final tests of the software by DARPA, the robot was required to autonomously perform 12 different grasping tasks of various objects (e.g. ball, rock, hammer), and 6 different manipulation tasks (e.g. drill, staple, open door). The JPL software controlling the robot enabled successful completion of 47/48 grasping tasks and 20/24 manipulation tasks.
More details of the JPL effort can be found in: End-to-End Dexterous Manipulation with Deliberate Interactive Estimation, by Nicolas Hudson, Thomas Howard, Jeremy Ma, Abhinandan Jain, Max Bajracharya, Steven Myint, Calvin Kuo, Larry Matthies, Paul Backes, Paul Hebert, Thomas Fuchs, Joel Burdick; in proceedings of the IEEE International Conference on Robotics and Automation (ICRA12), Minnesota, 14-18 May 2012.