
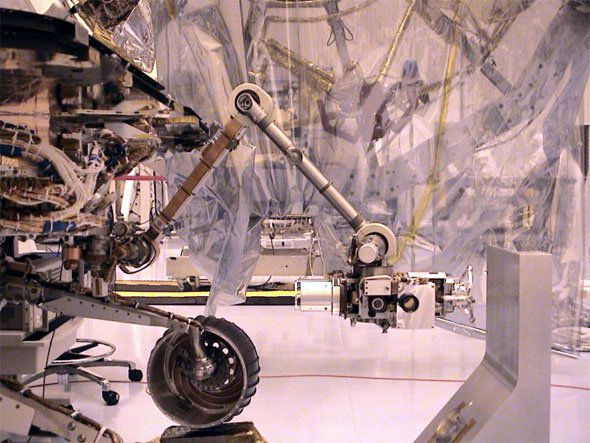
The MER Instrument Deployment Device during calibration and testing at The Kennedy Space Center, prior to launch.
The MERs carry a unique in situ instrument suite that has been designed to measure and understand the detailed geochemistry and morphology of the Martian surface. The suite includes the Mössbauer Spectrometer (MB), the Alpha Particle X-ray Spectrometer (APXS), the Microscopic Imager (MI), and the Rock-Abrasion Tool (RAT). The deployment and placement of these instruments onto the Martian surface (both soil and rock targets) is controlled by the Instrument Deployment Device (IDD). With 5 degrees of freedom, the IDD represents the most dexterous robotic manipulator ever flown to another planetary surface. It is mounted towards the front of the rover and is capable of reaching out approximately 0.8 meters in front of the rover at full extent. The IDD weighs approximately 4 kg and carries a 2-kg-payload mass (instruments and associated structure).
During rover-driving activities, the IDD is contained within a stowed volume that does not impact the rover's ability to traverse safely across the Martian terrain. Targeting for the placement of the in situ instruments on rock and soil targets is carried out using the front hazard-avoidance cameras (or front Hazcams) which are configured as a stereo camera pair. Onboard software controls the IDD based on sequences developed by ground operators. This software contains numerous low-level and high-level functions such as actuator current limiting based on temperature and pose, inverse kinematic Cartesian control, deflection compensation due to gravity and tilt-induced droop, model-based preloading of instruments on hard targets, and instrument placement using proximity feedback sensors.