
Phoenix Mars Lander: Robotic Arm, Targeting and Simulation, and Landing Site Characterization
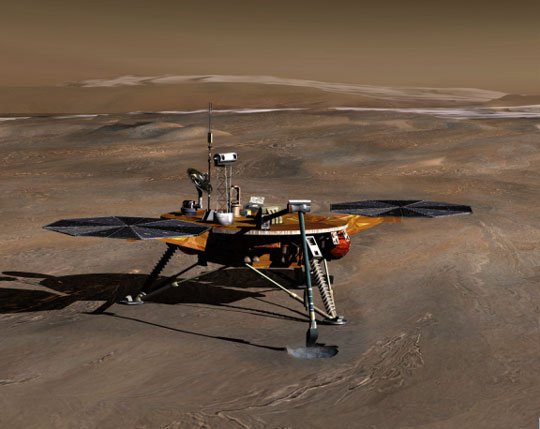
After a flawless landing in the north-polar region of Mars on 25 May 2008, National Aeronautics and Space Administration (NASA)’s Phoenix Mars Lander RA started an unprecedented surface and subsurface exploration of its landing site, a unique geologic setting for landed missions on Mars (Figure 1). The Phoenix Mars Lander mission is part of NASA’s Mars Exploration Program, a long-term effort of robotic exploration of the red planet to conduct field geology and atmospheric characterization. NASA’s Phoenix Mars Lander mission is the first under the NASA Mars Scout Program. The primary objectives of Phoenix mission was to 1) study the history of water in the Martian arctic and 2) search for evidence of a habitable zone and assess the biological potential of the ice–soil boundary. The RA operations team played a critical role in enabling scientists to characterize a wide range of surface and subsurface soil at the landing site in a timely manner. This enabled the hunt for geological clues that revealed that the soil is much more hospitable than many scientists had assumed.
The RA operations team developed and implemented several complex command sequences that used the icy soil acquisition device (ISAD) on the RA to acquire samples of Martian dry and icy soil and delivered the samples to the thermal and evolved gas analyzer (TEGA) [1] and the microscopy, electrochemistry, and conductivity analyzer (MECA) [2] on the lander deck during an extremely constrained tactical timeline.
For more details on all aspects of the Phoenix Lander mission, visit the Phoenix Project website.
Work elements of this project JPL Robotics is leading or contributing to in a major way include: