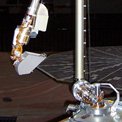
JPL Robotics has led the development of the robotic arm mechanism, and provides all algorithms, software, and operations tools for it. Its development incorporates system engineering, electronics, software, control algorithms, operations user interfaces, mechanical design, and a bio-barrier to keep the RA sterile prior to landing.
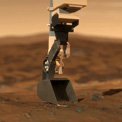
The robotic arm is critical to the measurement needs of the Phoenix mission. With a reach of two meters, and design similar to a backhoe, the arm can access large portions of the terrain around the lander. It will dig trenches, abrade frozen regolith, scoop soil and ice particles, and deliver these samples to the onboard science instruments for detailed chemical and geological analysis.