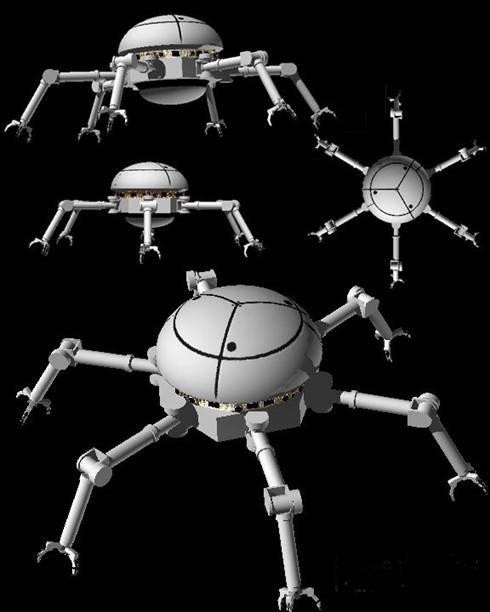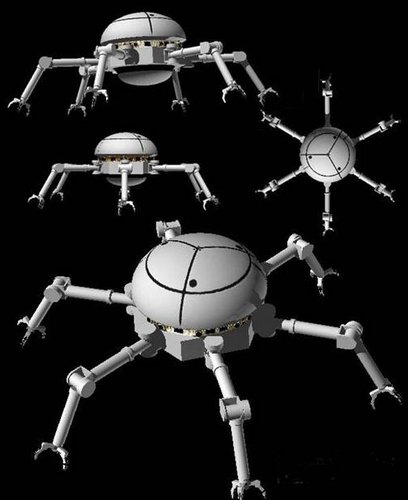
The Autonomous Walking Inspection and Maintenance Robot (AWIMR) task will provide NASA with an arthropod robot capable of autonomously navigating across truss structures as well as paneled surfaces in space environments to perform inspection and maintenance tasks autonomously or under teleoperation. This capability will provide significantly expanded architecture options and flexibility while reducing cost and improving safety by reducing requirements for humans to perform extra vehicular activities (EVAs). With the Northrop Grumman Corp acting as the project PI and system lead, JPL will fulfill its Phase I Co-I role by providing the use of a dexterous robot and associated control algorithms for research that will inform the final Phase II design. In Phase II, JPL will develop the kinematic layout of the robot, detailed joint design, and continue to develop low-level algorithms associated with the mobility and manipulation by a dexterous robot.
JPL has a co-investigation role for this work, which is led by Mark Hanson of
Northrop Grumman.
People on this Task
Kevin Nickels
Avi Okon
Julie Townsend