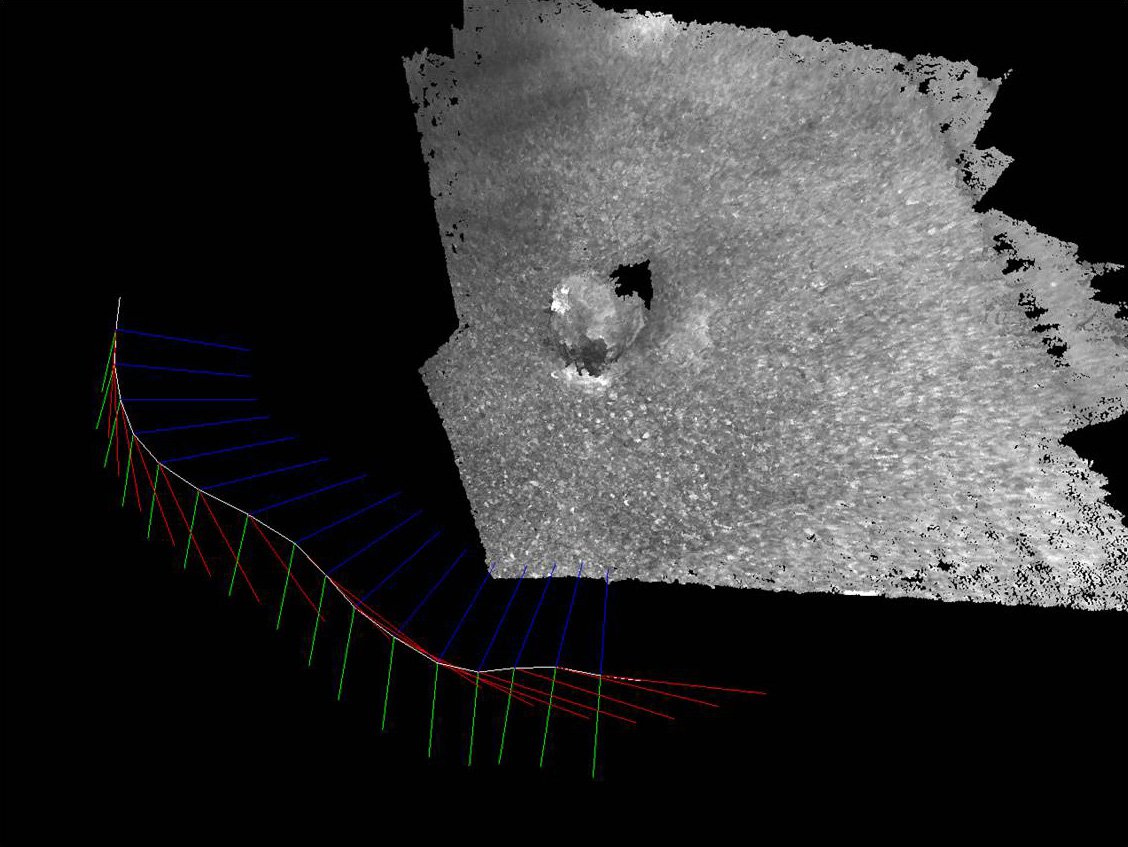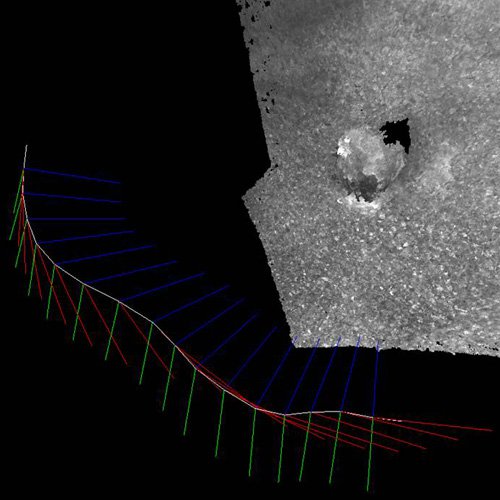
Terrain reconstruction is accomplished using imagery obtained from a number of frame locations.
To enable more effective teleoperation of explosive ordinance disposal (EOD) robots, JPL will develop a vision-based software system for 3D object modeling and visualization. The system is designed to support human operators in the field, and is focused on providing real-time or near real-time results. The system will support modeling of objects ranging in size from several centimeters to several meters, including object interiors such as the trunk of a vehicle. It is designed to function under a wide range of lighting conditions, including night-time, with the addition of optical illuminators.
Phase 1 will demonstrate a working system and evaluate the completeness and accuracy of the generated models, using targets of known shape in surveyed environments. Phase 2, will involve integration of the software pipeline on EOD platforms and evaluation of this system in varied illumination conditions.
This research is funded by the
Robotics Technology Consortium.