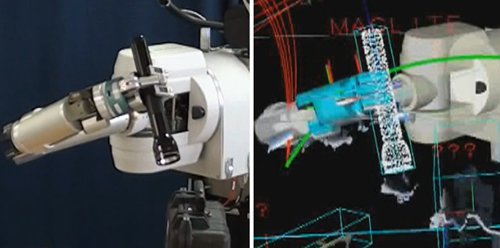
This video shows visual object recognition and manipulator path planning in a cluttered environment. First the scene is imaged and the flashlight localized. Then a path is planned to move to the grasp position, grasp, and carry the flashlight to the target orange square on the table top. The planned path avoids collisions of the arm and flashlight with the rest of the environment, while optimizing path length and joint torques.