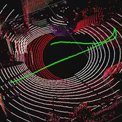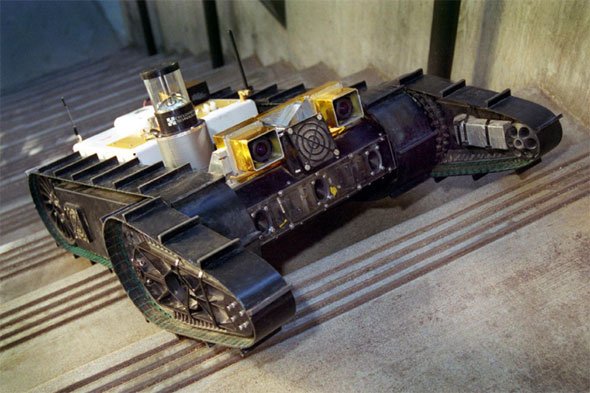
Fig. 1: The "Urbie" urban robot during vision-guided, autonomous stair climbing.
The Mobility and Robotics Section is very active in research for non-NASA sponsors on a variety of topics, including perception for autonomous navigation of unmanned ground, air, and sea surface vehicles (UGVs, UAVs, and USSVs), as well as object recognition from ground and overhead vantage points to serve a variety of applications.
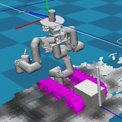
Perception research for autonomous UGVs addresses real-time 3-D perception, multi-sensor terrain classification, and learning from experience to improve navigation performance. JPL pioneered the development of real-time stereo vision for 3-D perception for off-road navigation, continues to improve algorithms for this function, and pursues custom hardware implementations of stereo vision for compact, low-power, high-speed vision systems. Recent achievements in this area include FPGA-based stereo processing for sub-millisecond computation of range images with low power consumption. In addition to stereo vision with visible-spectrum cameras for daylight operation, JPL has demonstrated autonomous navigation at night using thermal-infrared stereo cameras and addressed the ability to see in 3-D through a variety of atmospheric obscurants using thermal-infrared cameras. JPL has also developed small, two-axis scanning laser range finders for man-portable UGVs and conducts research on flash ladar that is applicable to standard UGVs. In addition, JPL is active in urban robot navigation, for which we have developed the first vision-and-control system for autonomous robot stair climbing (figure 1), and improved vision algorithms for detecting and tracking people around robots for safety reasons (figure 2).

Fig. 2: Demonstration of moving person detection. Left: input image. Right: input image labeled with detected moving person.
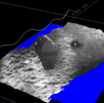
Multi-sensor terrain classification is essential in off-road UGV navigation to determine the traversability of complex terrain that can include potholes, ditches, bodies of water, vegetation, and a variety of man-made obstacles. Potholes, ditches, and related depressions, collectively called "negative obstacles," are particularly difficult to detect from ground level because of the shallow view angle. JPL developed a partial solution to this problem by showing that negative obstacles tend to stay warmer than surrounding terrain at night, so they have detectable signatures in thermal-infrared imagery at night. Water bodies are also important navigation hazards, and are difficult to detect because range sensors on UGVs generally are unable to measure distance to the water surface. JPL is developing algorithms that integrate several cues for reliable water detection (including reflection characteristics and thermal properties) and modeling ladar beam propagation through water (figure 3). Ladar sensing is also being used by JPL to recognize vegetation and assess its traversability. We have pioneered the use of 3-D scatter analysis of ladar data to reason about material density for this purpose. JPL also has applied multispectral classification to this problem, with visible and near-infrared imagery, texture classification with Gabor filters, and multispectral thermal-infrared classification.

Fig. 3: Demonstration of water detection in natural terrain. Left: pond reflecting sky and terrain. Right: detected water regions.