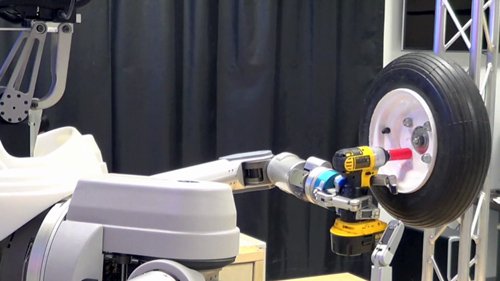
This video shows an autonomous two-arm manipulator changing a wheel mounted on a fixed stand. The robot scans the scene to segment out objects, identifies the wheel and impact-driver, manipulates the impact-driver to remove all four lug nuts, and removes the wheel. A human user then places a new wheel in the scene and the robot completes the sequence by mounting the new wheel on the bolts. The video is sped up by 2x and is all one continuous shot from multiple camera angles.