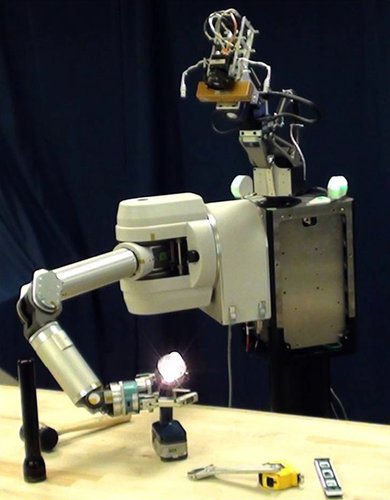
The DARPA Automous Robot Manipulation - Software (ARM-S) Program provided this hardware configuration for JPL participation during Phase 1 of the program. Shown are the sensing head, single manipulator and hand, and test objects for grasping experiments. Phase 2 of the program will use a dual-arm configuration.