Skip Navigation
NASA
Jet Propulsion Laboratory
California Institute of Technology
JPL Robotics
Home
Who We Are
Groups
People
What We Do
Applications
Flight Projects
Research Tasks
Charter
How We Do It
Systems
Facilities
Gallery
Achievements
Publications
Patents
Awards
Careers
News
Home
>
Gallery
>
Real-Time Visual Terrain Reconstruction for BigDog, 2008
Gallery
Real-Time Visual Terrain Reconstruction for BigDog, 2008
03/06/2008
vid916-132-video.mov (MOV, 2.64 MB)
vid916-132-video2.mov (MOV, 37.22 MB)
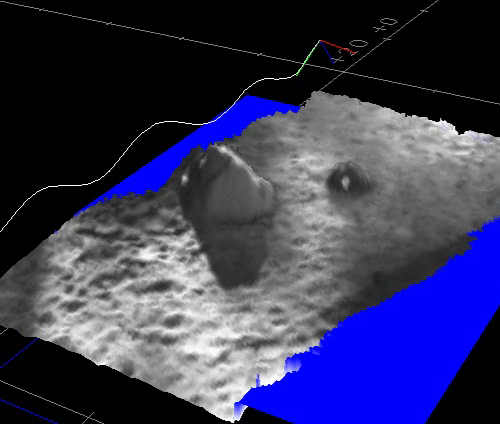
Real-time terrain reconstruction for the BigDog vehicle using a stereo camera. The camera motion is estimated using visual odometry and stereo range points are projected into an elevation grid map. (1:43)
Application:
Military & Terrestrial
Research Task:
Vision System Development for BigDog