Home >
Gallery >
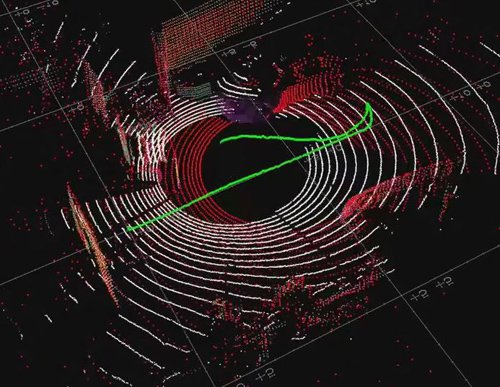
Surrogate, Lidar-Based Pose Estimation, 2014
Gallery
Surrogate, Lidar-Based Pose Estimation, 2014
10/15/2014
A short video showing the Surrogate robot lidar-based pose estimation algorithm using a Velodyne laser range finder. The robot is moved along an approximate path 5-10m in length and the pose is shown in green. Keyframes are stored and used to associate each new laser scan frame in an iterative-closest-point methodology.