
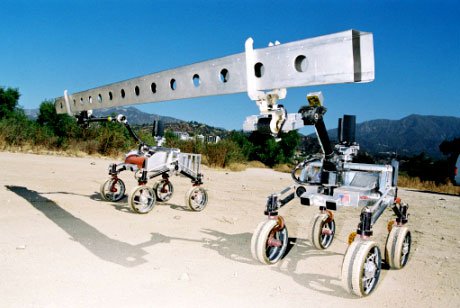
Fig. 1: SRR and SRR2K acting as the Robot Work Crew, transporting an extended beam (2.5 meters long) in the Arroyo Seco next to JPL. The terrain is sandy soil with an average slope of 9-degrees.
The Sample Return Rover (SRR) and its twin (SRR2K) are two technology-prototype rovers that each have 4 wheels with independent drive and steering actuators. These rovers have a passive instrumented rocker-type suspension system, and SRR has independently controllable articulated shoulder joints. The SRR was built in 1997, and SRR2K followed in 2000. Both rovers have 4-degrees-of-freedom (DOF) arms that have an end-effector designed to safely carry boxlike objects using force-feedback sensors in the wrist. The rover avionics subsystem is currently a PC104+ stack with a Pentium CPU (266 MHz) running under VxWorks 5.4. These rovers have been used both singly and in pairs for technology development in the areas of sample cache retrieval, lander rendezvous, all-terrain exploration, cliff-face traverse, and robotic work crews.

Fig. 2: SRR2K acting as the cliff-traversal robot with two fixed anchor-bots at the top of the cliff actively controlling the tethers for stability.
For the sample-cache-retrieval scenario, SRR has used a sequence of visual and/or RF goal detection, navigation, terminal guidance, 3D object recognition and localization, and arm-servo functions to approach a stationary target rover and retrieve the science-sample cache it carried. This technology was further extended for the lander-rendezvous scenario, where a combination of visual wavelet texture-based, lander-structure analysis, and ramp-pattern detection has been used by SRR to return to a stationary lander from extended distances (100+ meters) away and to climb back onto the lander deck.
In the all-terrain exploration scenario, SRR has used its articulated shoulder joints to sense the underlying terrain with the IMU and stereo cameras, and has used a stability metric to adapt itself to a stable configuration.
For multiple-robot scenarios, a control architecture called CAMPOUT (Control Architecture for Multi-robot Planetary Outposts) has been used to coordinate the activities of the individual robots. The SRR2K has been used to traverse a cliff face with two anchor-bots at the top of a cliff (see Figure 2) providing stability through tethers. In the robot-work-crew scenarios, SRR and SRR2K have been used as a team to grasp, hoist, transport, and position extended objects for surface construction operations (see Figure 1).




