The cost and risk of building and maintaining facilities in orbit or on planetary surfaces with only an astronaut-EVA approach would be prohibitive. Robots will have to carry structural and operational elements of the facilities, assemble those elements, and perform inspection, maintenance, and repair over the lifetime of the facility.
Since the cost of launching a system is always a primary consideration, robots must do as much work as possible for a given mass and volume, which requires that each robot have as wide an operational range as possible. It should be reconfigurable, either by having multi-use subsystems or by having modular subsystems that can be swapped out.
Robots will have to work together. Payloads that the robots will have to handle are likely to be much larger than the robots themselves. Like two friends carrying a ladder, robots will have to be able to communicate and coordinate their actions.
Robots will also have to be supervised by humans. An operator may supervise a large group of robots by issuing general commands (e.g., assemble this trusswork), and the robots will organize and monitor themselves and other robots for faults. In a teleoperation scenario, the controller would have direct control over an individual robot. And at the most direct level, EVA astronauts may physically interact with the robots, working as human-robot teams.
JPL has worked on a wide variety of projects and robots for these purposes:
LEMUR
The Limbed Excursion Mechanical Utility Robot (LEMUR) is a small, agile and capable six-legged walking robot under development to support assembly and inspection of orbital structures and spacecraft. Its stereo camera set allows vision in any direction, and its "quick-connect" modular effectors allow fast and flexible changeout of tools. In short, LEMUR is a robotic manifestation of a six-limbed primate with Swiss Army knife tendencies.
Robot Work Crew
SRR (Sample Return Rover) and its twin, SRR2K, are two technology prototype rovers which have been used in pairs as a robotic work crew to perform assembly operations pertinent to planetary surfaces. JPL Robotics has developed software for cooperating multiple robots performing tightly coordinated tasks. The system enables simultaneous multi-dimensional controlled application of force and movement by a team of robots in uncertain terrain to achieve goal-level coordinated behaviors.
Remote Surface Inspection
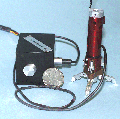
JPL's prior Remote Surface Inspection system research was comprised of three subsystems: robot manipulation, graphical user interface, and multi-sensor inspection. Central to the latter was the compact (3.5 kg) Integrated-Sensor End Effector (ISEE), which employed two CCD color cameras and illuminators for visual inspection, and a suite of other sensors to detect temperature, gas/vapors, eddy-currents, proximity, and force.
Dexterous Arm Control for Ranger
JPL contributed to the University of Maryland's satellite servicing system, Ranger, by providing configuration control and collision avoidance for its two 7-degree-of-freedom arms. Both individually and cooperatively, the army performed a variety of manipulation experiments and servicing operations, using this approach. Features included a capability for real-time, model-based collision detection and avoidance for the arms, and a method for ground operators to maximize the useful workspace by optimal placement of the Ranger base.