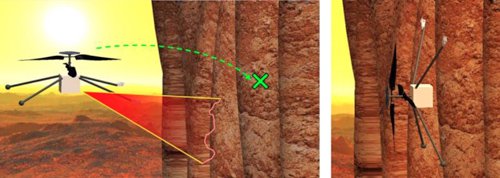
Conceptual graphics of the the before and after position of the helicopter perching action.
This goal of this task is to develop hardware and software that enables a Martian flying vehicle to perch on steeply sloped or vertical terrain. Geologic features of high astrobiological interest such as Recurring Slope Lineae (RSL) and gullies that may be formed by active flowing water occur on or near steep slopes, making them inaccessible to other means of in situ study. The perching system developed in this task should enable new mission concepts that would investigate large sections of steeply sloped or vertical terrain (e.g., Valles Marineris, craters, caves, pit or fissure walls) on Mars.
Additionally, such a flying system could recharge its batteries while perched using solar panels, enabling long transects up or across canyon walls and crater outcrops. Martian environmental conditions severely limit rotorcraft flight times; the Mars2020 Project Helicopter is planned to fly for only 90 seconds per charge. Consequently, the maximum ascending height of the Mars helicopter is limited to a few tens of meters. The proposed mechanism would enable a mission to fly incrementally up (or down/across) the walls of Valles Marineris (7km depth) for example, through sequences of flying, perching, and recharging batteries, even with short individual flights.
People on this Task
Spencer Backus

