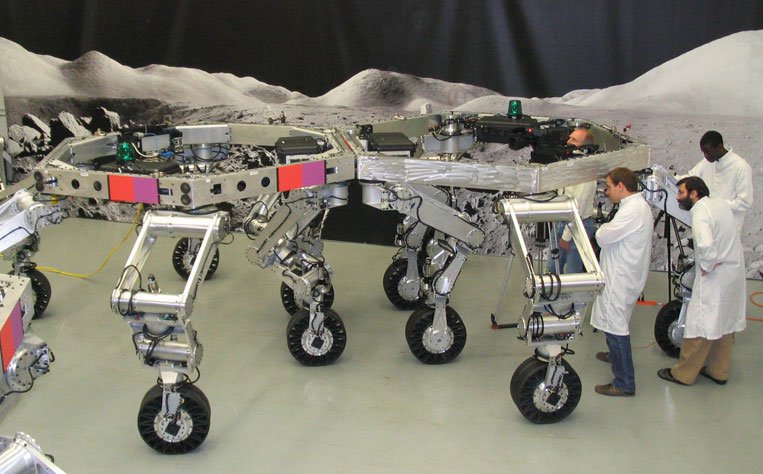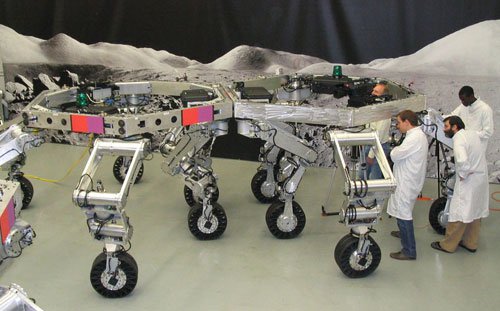
Docking experiments with two ATHLETE rovers.
Our team, including JPL, JSC, ARC, Stanford, and Boeing will conduct a focused R&D project to develop and demonstrate at TRL 6 a robotic vehicle that is capable of efficient rolling mobility over Apollo-like undulating terrain and walking over extremely rough or steep terrain. This will enable robotic or human missions on the surface of the moon to reach essentially any desired site of interest. It will also enable them to load, transport, manipulate, and deposit payloads, either with separate vehicles or docked together in groups to support very large payloads.
In Phase I, this project will conduct a detailed system engineering analysis leading to a flight-like Preliminary Design Review (PDR) at the end of the first year. In addition, the project will create a subscale "Software Development Model" (SDM) vehicle that matches the overall kinematics of the final vehicle and can be used for software development and validation starting at the beginning of Phase II. The system engineering analysis will include structural, thermal, actuator, motor control, computing, vision and sensor interfacing, communications, operator interface, and power subsystem analysis and preliminary design.
People on this Task
Norman Aisen
Jeffrey Biesiadecki
Daniel Chavez-Clemente
Matthew Heverly
Todd Litwin
Jaret Matthews
Julie Townsend